Unsatisfied with the GPS trackers available on the market, I decided to design my own. This site follows my component-level design and build of an ultra-low-power wireless cat tracker.
A few years ago we got some cats – Buttons and Turnip! Buttons is the big tabby cat and that’s Turnip, below.

I would imagine that every cat-owning Engineer has at one point or another wondered about either buying or making a tracker for their cat so they can see what he or she gets up to after they jump over the garden wall.
Turnip isn’t like most cats. There’s no need to make or buy a tracker for her because she hasn’t left the garden in 3 years. Well, she did end up in next door’s garden once, but I got the impression from the noises she was making that it was incompetence that caused her to end up there, rather than a desire to be more than 10 feet away from her bed.
Buttons however, would benefit from a tracker. Although he doesn’t disappear for days at a time like some cats, he is often nowhere to be seen, only to turn up a few hours later covered in cobwebs or some other kind of grime.
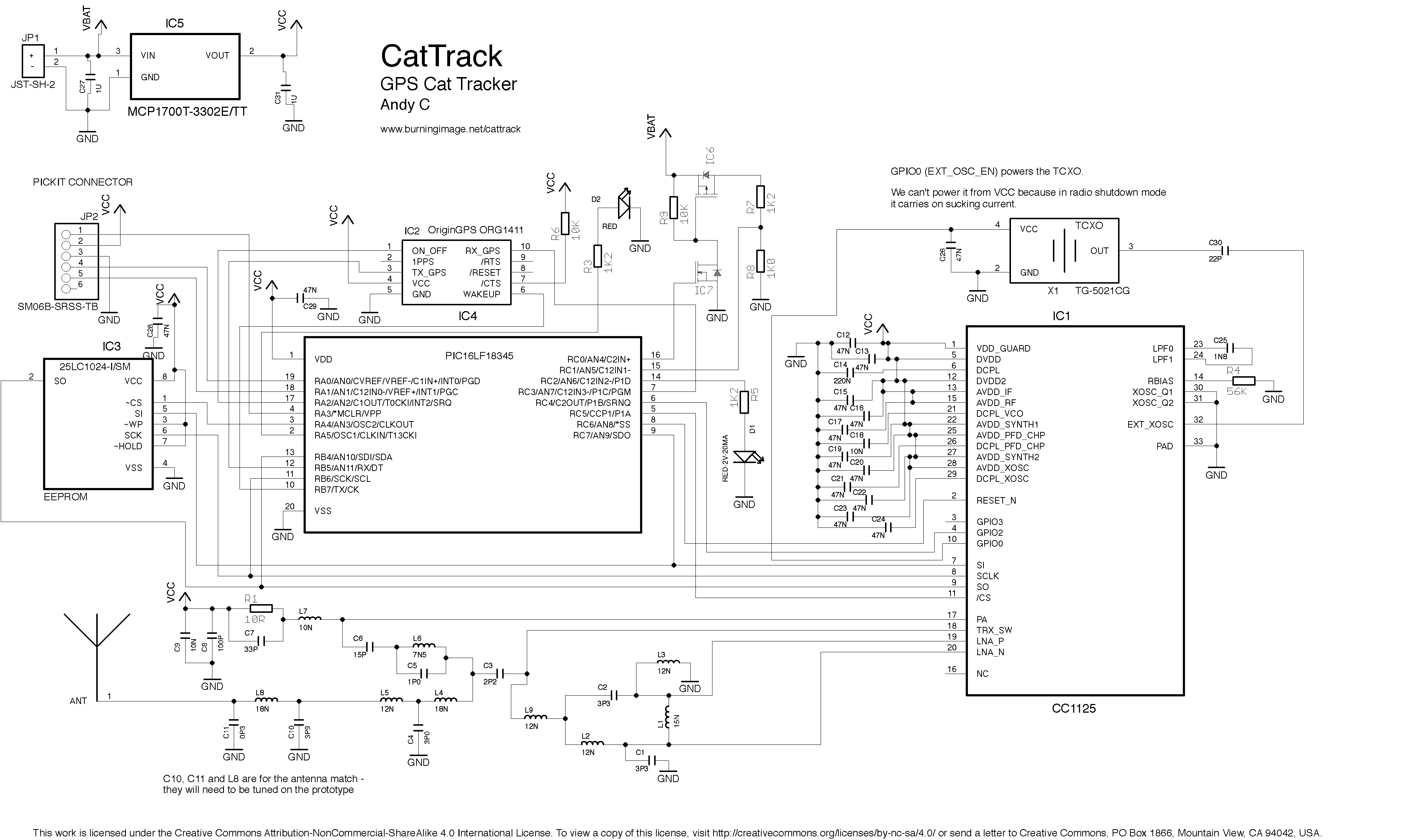
As you can read in my About Me page, I’ve got a fair bit of experience with electronic design. It’s been my job for the last 10 years. None of the cat trackers on the market fitted my needs (as I’ll explain in a separate post) so I decided to design and build one that’s much better than anything you can buy! (hopefully…)
I’ll be doing a component-level design, from schematics, through PCB design and ultimately casing it all up in a case appropriate for Buttons to carry around with him. I’m sure there will be second revision too, to mop up all my cock-ups from the first revision!
This blog is partly a way to force myself to finish the project. I wouldn’t want the 3 people reading this to be disappointed would I!