It’s been over 2 years since CatTrack 2.0 was “on it’s way”….
Well… umm… it hasn’t progressed much since the previous post. I’ve had some good email chats with a good guy called Robert, who has been working on something very similar over in the Czech Republic. He has made many prototypes and has shared his thoughts with me around getting decent GPS reception. In the end he has settled on a Quectel LC86L GPS module and engineered the box such that the antenna sticks out a little, drastically improving reception.
I was having some reception issues with the u-blox GPS module I was using for CatTrack 2.0, which caused me to think about making a slightly different device…
I’m thinking of making a device that is essentially just an RF tracker with no GPS functionality, such that if your cat (or dog?) is lost you’ll be able to roam the streets with a small base unit keeping an eye on the signal strength, allowing you to get closer and closer to the cat, until you are close enough to activate a sounder and some lights, letting you use your ears and eyes to get the last few metres to the cat (a much lower tech but equally effective version of Apple’s UWB locating system!).
It’ll essentially be a bit like an Apple AirTag (without the crowdsourcing) or a Tile, only with one key difference… the range!
I would like a true range of hundreds and hundreds of metres, such that you can have some confidence from very far away that you are communicating with the collar and heading in the right direction.
I own several AirTags and several Tiles and they are a bit annoying in that you have to be pretty close before your phone actually sees the tag. The crowdsourcing functionality of the AirTags is great, but my hope is that given that we’re talking about cats here and not luggage moving from airport to airport, a few hundreds metres should be absolutely fine.
I have some RF changes I’d like to make. For increased sensitivity I’d like to move away from the TI CC1xxx range of devices, to LoRA, probably a device using the SX1276. This will be a bit of a faff for me as it’s a whole new architecture and set of registers to learn, but I’ve decided to bite the bullet.
I’d like to use a module rather than messing around soldering the SX1276 directly. Luckily HopeRF sell one, the RFM95W, pictured below. They don’t actually say that they’re using the SX1276, but the specs match exactly, so I’m sure they will be.
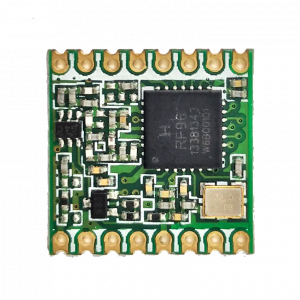
A 168 dB link budget is possible with this device, which is absolutely mad and in theory will go many many tens of miles. In reality it’ll be much less, but hopefully much further than anything I’ve designed before, allowing me to track the cat down using signal strength alone hopefully relatively easily.
I’d like to get it into the smallest flanged case that Hammond make, which has exterior dimensions of only 35 x 35 x 15mm. With no need to fit GPS in we can save a lot of space.

By moving the antenna externally we can also hopefully save a lot of space internally. Previously I have used PCB trace antennas, which have a lot of strict requirements around the PCB size and form, which can result in the enclosure being much bigger than it might otherwise need to be.
I’m thinking of having the antenna external, something like the image below. It’ll stick out the side a bit, but given the case will a lot smaller that shouldn’t be a problem. I’ll match the antenna using the nifty nanoVNA that I’ve been playing with. Highly recommended for anyone doing any RF designs!

I’ll still be using a PIC Microcontroller to bring everything together of course, because I love them!
I’ll need to get on and start trying to fit things onto a PCB in the next few days/weeks, and then hopefully crack on getting the bits ordered, the boards fabricated and the firmware started. As mentioned before, the new LoRA device will be a bit of a learning curve, but it’s doable!
Motivation is currently high!
However… motivation is easy… commitment is hard!
Watch this space! (again)
I hope you’ll manage to do what you want ^^
Can’t wait for you to post any improvement and you did it .
“close enough to activate a sounder and some lights, letting you use your ears and eyes”
We found that when Nyx went missing (but with a Tile attached), we could locate her to within a few tens of yards using the phone’s map but the last fine resolution, based on ears, was very difficult. Had the Tile had a flashing LED built-in (maybe one very bright flash per 10 s in sync with a tone) then the last five or so feet – the last metre or two – would have been easy. There were a couple of occasions where the Tile had become detached and although we got close, we ultimately couldn’t find the Tile in the very dense vegetation cover. We have give up with the Tile approach now.
Good info, thanks! I’ll definitely make sure I build in LEDs then.
Just stumbled across your blog after finding I’m having very similar issues you’re facing! I think you’re really on to something with LoRa. I learnt a lot from GreatScott’s YouTube channel on this especially his “Automating a Greenhouse with LoRa parts 1 & 2”.
You could maybe even incorporate some form of energy harvesting to help with battery life?
I haven’t yet read your previous posts but will be doing now! I look forward to watching where you go with this, any help I can offer I’d be more than happy to oblige.
Good to hear from you! I’ll check out greatscott’s youtube channel. I’ve got all the bits now and a PCB is on the way so fingers crossed I’ll be able to get cracking soon.